Ένα φαινομενικά χαλαρό βίντεο από το Carnegie Mellon University κατάφερε να γίνει viral στη ρομποτική κοινότητα. Σε αυτό, ένα τετράποδο ρομπότ διανύει περίπου 60 μέτρα με έναν ελεύθερο κύλινδρο ακουμπισμένο στην πλάτη του, χωρίς κανένα φυσικό στήριγμα, χωρίς αυλάκια, χωρίς προστατευτικά τοιχώματα. Κι όμως, το αντικείμενο δεν πέφτει ούτε όταν το ρομπότ αλλάζει ξαφνικά κατεύθυνση, ούτε όταν περνάει πάνω από εμπόδια, ούτε όταν ένας άνθρωπος το σπρώχνει επίτηδες. Για έναν άνθρωπο, αυτή η ικανότητα μοιάζει αυτονόητη. Για ένα ρομπότ, όμως, είναι εντυπωσιακή απόδειξη εξελιγμένης αντίληψης και ελέγχου του σώματος.
Ο λόγος αυτής της εντυπωσιακής επίδειξης είναι το LocoTouch, ένα νέο σύστημα πυκνής, κατανεμημένης απτικής αίσθησης. Η τεχνολογία αυτή επιτρέπει στο ρομπότ να «νιώθει» με ακρίβεια το αντικείμενο που κουβαλάει, χωρίς την ανάγκη για άκαμπτους σκελετούς, δοχεία ή εξωτερικά πλαίσια. Η επιφάνειά του είναι εντελώς επίπεδη, αλλά χάρη στους αισθητήρες καταγράφει κάθε μικροσκοπική μετατόπιση του φορτίου σε πραγματικό χρόνο.
Ο πυρήνας του LocoTouch είναι ένα λεπτό πιεζοανθεκτικό στρώμα τοποθετημένο ανάμεσα σε δύο πλέγματα αγώγιμου υφάσματος. Η διάταξη αυτή δημιουργεί έναν πλέγμα αισθητήρων όπου κάθε «κόμβος» λειτουργεί σαν ένα μικρό σημείο πίεσης. Όταν ο κύλινδρος πάνω στην πλάτη μετακινηθεί έστω και δύο χιλιοστά, το υλικό παραμορφώνεται και η ηλεκτρική αντίσταση σε εκείνο το σημείο αλλάζει. Με αυτόν τον τρόπο το ρομπότ ξέρει ανά πάσα στιγμή προς ποια κατεύθυνση γλιστράει το φορτίο του. Το αποτέλεσμα είναι μια συνεχής, κοκκώδης ροή δεδομένων, πολύ πιο πλούσια από ό,τι προσφέρουν οι παραδοσιακοί, μεμονωμένοι αισθητήρες επαφής.
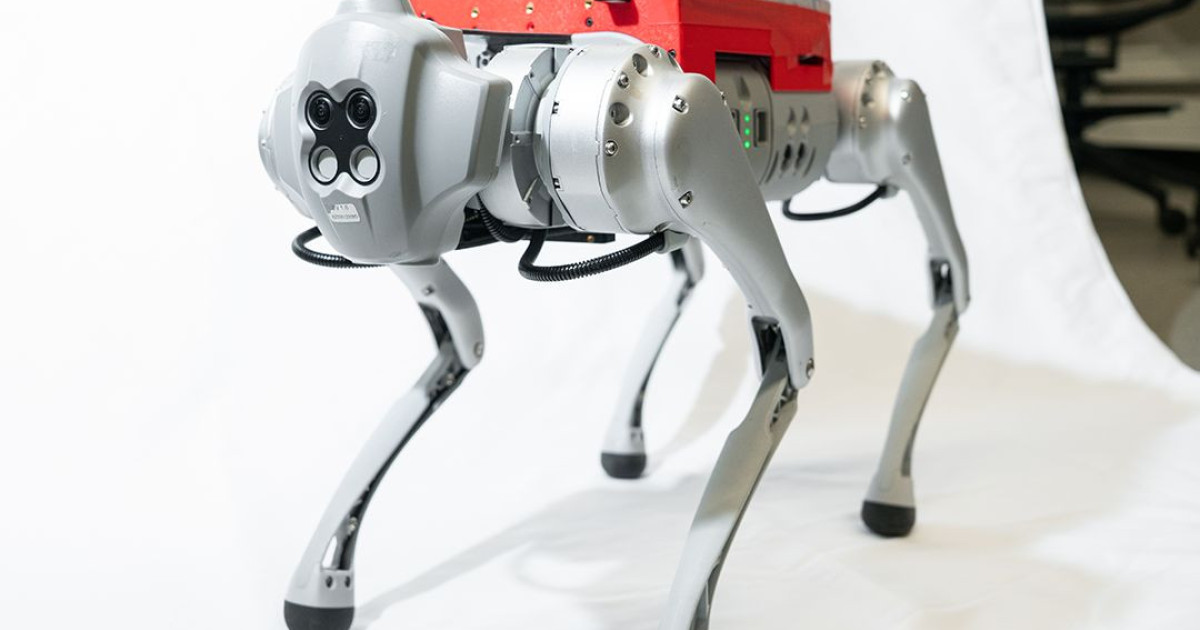
Αν αυτό ακούγεται εντυπωσιακό, το πώς εκπαιδεύτηκε το ρομπότ είναι ίσως ακόμη πιο συναρπαστικό. Οι ερευνητές χρησιμοποίησαν μια τεράστια διαδικασία simulation: περισσότερες από 4.000 ψηφιακές εκδοχές του ρομπότ εκτέθηκαν σε χιλιάδες σενάρια. Εμπόδια, αλλαγές κλίσης, απότομες μετατοπίσεις του αντικειμένου, ασύμμετρες φορτίσεις, ακόμα και συνθήκες που δύσκολα αναπαράγονται στον πραγματικό κόσμο. Όλα αυτά ενσωματώθηκαν σε ένα μοντέλο μέσω reinforcement learning και στη συνέχεια μεταφέρθηκαν απευθείας στο φυσικό ρομπότ, ένα Unitree Go1. Η λειτουργία του στον πραγματικό κόσμο δεν χρειάστηκε καμία περαιτέρω προσαρμογή, μια ένδειξη του πόσο ώριμες έχουν γίνει οι τεχνικές digital twin.
Παρακολουθώντας το ρομπότ σε δράση, η συμπεριφορά του θυμίζει άνθρωπο που μεταφέρει ένα εύθραυστο ή ασταθές αντικείμενο σε έναν δίσκο. Η στάση του σώματος αλλάζει διαρκώς, οι κινήσεις γίνονται πιο προσεκτικές, η ισορροπία προσαρμόζεται στιγμιαία ώστε να αντισταθμίσει τις μικρές μεταβολές του βάρους. Το Unitree Go1, χάρη στο LocoTouch, ακολουθεί την ίδια λογική: κάθε του βήμα, κάθε στροφή και κάθε μικρή κίνηση επηρεάζεται από την πληροφορία που λαμβάνει από την πλάτη του. Το αποτέλεσμα είναι μια ρευστότητα στην κίνηση που ξεφεύγει από τις κλασικές, άκαμπτες αντιδράσεις των ρομπότ και μοιάζει περισσότερο με φυσική, ζωική κινητικότητα.
Με μια τέτοια βάση, τα επόμενα βήματα είναι ήδη ορατά. Η ομάδα ανάπτυξης εργάζεται σε μια πιο εκτεταμένη εκδοχή του συστήματος, που θα καλύπτει μεγαλύτερες περιοχές του σώματος του ρομπότ — στα πλευρά, στα άκρα, ακόμα και στα πλαϊνά πάνελ. Με αυτόν τον τρόπο ένα τετράποδο ρομπότ θα μπορούσε να χρησιμοποιήσει όχι μόνο την όρασή του αλλά και μια ολοκληρωμένη «αίσθηση αφής» για να αλληλεπιδρά με το περιβάλλον γύρω του.
Η προοπτική είναι να αποκτήσει μια συμπεριφορά πολύ πιο κοντά σε αυτή ενός ζώου, με δυνατότητα να αντιλαμβάνεται πιέσεις, τριβή, επαφή και μικρομετακινήσεις που μέχρι σήμερα απλώς αγνοούνταν από τα περισσότερα ρομποτικά συστήματα.


{kind=link}
{kind=link}
{kind=link}