Η ιδέα ότι ένα ρομπότ μπορεί να εκτελεί λεπτές, ανθρώπινες κινήσεις – όπως το να ανοίξει ένα κουτάκι αναψυκτικού ή να κρατήσει ένα iPhone χωρίς να το ρίξει – έμοιαζε μέχρι πρόσφατα με επίδειξη φουτουριστικής φαντασίας. Όμως, ένα νέο project που παρουσιάστηκε από την TetherIA δείχνει ότι αυτή η πραγματικότητα βρίσκεται ήδη στα χέρια μας.
Το Aero Hand Open είναι μια νέα γενιά ρομποτικού χεριού, σχεδιασμένη όχι μόνο για επίδειξη δεξιοτεχνίας, αλλά και για να γίνει πραγματικό εργαλείο έρευνας, διαθέσιμο σε όλους. Το πιο εντυπωσιακό; Είναι ανοιχτού κώδικα, οικονομικά προσιτό και μπορεί να κατασκευαστεί σχεδόν εξ ολοκλήρου με έναν 3D printer.
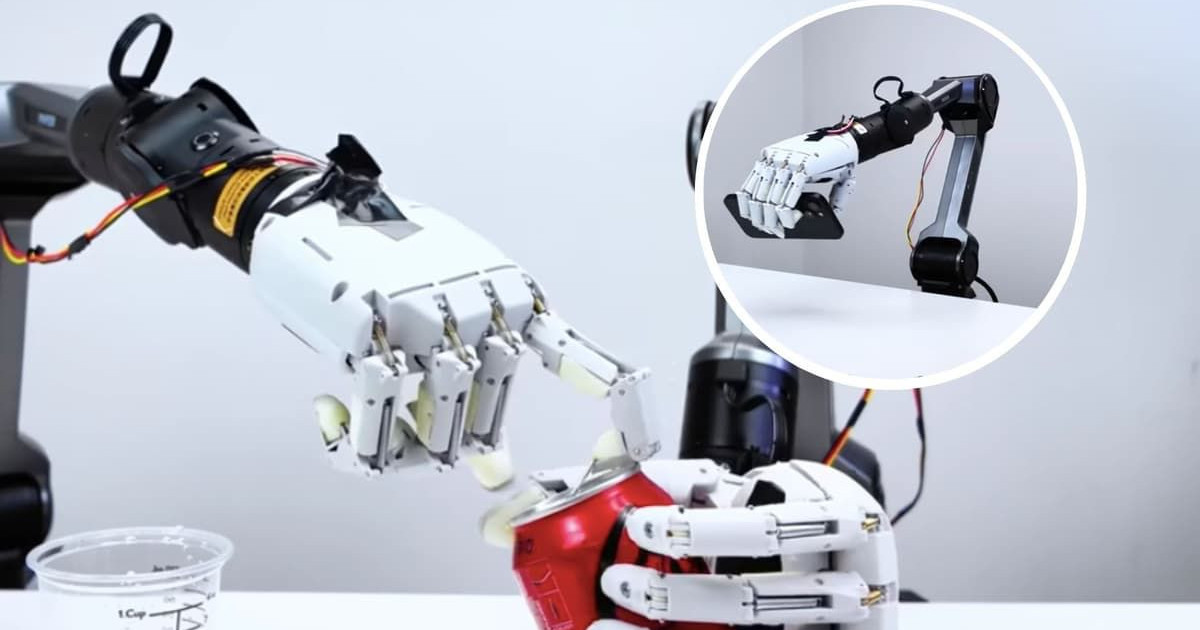
Στο demo video που δημοσίευσε η TetherIA, βλέπουμε το Aero Hand να ανοίγει με ευκολία ένα κουτάκι αναψυκτικού, να πιάνει ένα smartphone και να χειρίζεται μικρά αντικείμενα με φυσικότητα που θυμίζει ανθρώπινο χέρι. Ο μηχανικός Xu Dong, επικεφαλής του project, εξηγεί ότι ο στόχος ήταν να επιτευχθεί «ισορροπία ανάμεσα στην ακρίβεια και την απλότητα», αποφεύγοντας την πολυπλοκότητα των παραδοσιακών ρομποτικών συστημάτων.
Σε αντίθεση με τα περισσότερα ρομποτικά άκρα που χρησιμοποιούν πολύπλοκους μηχανισμούς, το Aero Hand βασίζεται σε ένα σύστημα καλωδίων και τενόντων που διασταυρώνονται μέσα στα δάχτυλα. Με μια μόνο κίνηση, το σύστημα μπορεί να κάμψει πολλούς αρμούς ταυτόχρονα, επιτρέποντας στο χέρι να προσαρμόζεται φυσικά στο σχήμα οποιουδήποτε αντικειμένου.
Αυτή η σχεδίαση κάνει τη συσκευή ιδιαίτερα ικανή στο να πιάνει ανώμαλα ή εύθραυστα αντικείμενα χωρίς να τα συνθλίβει — μια λεπτομέρεια κρίσιμη τόσο για τη ρομποτική έρευνα όσο και για πρακτικές εφαρμογές όπως η φροντίδα ηλικιωμένων ή η βιομηχανική συναρμολόγηση.
Η μεγαλύτερη καινοτομία του Aero Hand Open δεν βρίσκεται μόνο στη μηχανική του, αλλά στη φιλοσοφία πίσω από το project. Σε μια εποχή που τα περισσότερα προηγμένα ρομποτικά συστήματα είναι πανάκριβα και κλειστού τύπου, η TetherIA αποφάσισε να κάνει κάτι διαφορετικό: να δημοσιεύσει τα πάντα ανοιχτά.
Όλα τα σχέδια, τα διαγράμματα, τα αρχεία εκτύπωσης και οι οδηγίες συναρμολόγησης βρίσκονται διαθέσιμα στο GitHub. Το firmware και το λογισμικό βασίζονται στον ESP32 microcontroller και είναι πλήρως συμβατά με το ROS2, το καθιερωμένο λειτουργικό περιβάλλον για την έρευνα στη ρομποτική. Αυτό σημαίνει ότι οποιοσδήποτε —από πανεπιστημιακά εργαστήρια μέχρι ανεξάρτητους δημιουργούς και φοιτητές— μπορεί να κατεβάσει τα αρχεία, να εκτυπώσει τα εξαρτήματα και να συναρμολογήσει το δικό του ρομποτικό χέρι.
Η τιμή του πλήρους κιτ είναι επίσης ενδιαφέρουσα: μόλις €314. Ένα ποσό εξαιρετικά χαμηλό σε σύγκριση με τις χιλιάδες ευρώ που απαιτούνται για εμπορικές ή ακαδημαϊκές λύσεις παρόμοιας πολυπλοκότητας. Η ελαφριά, αρθρωτή κατασκευή του Aero Hand το καθιστά ιδανικό για εκπαιδευτική χρήση, έρευνα ή ακόμα και για προσωπικά projects δημιουργών που θέλουν να εξερευνήσουν τα όρια της ρομποτικής χειραψίας.
Ένα ακόμη εντυπωσιακό χαρακτηριστικό του Aero Hand Open είναι το σύστημα τηλεχειρισμού του. Η TetherIA έχει ενσωματώσει ένα module τηλελειτουργίας που επιτρέπει τον απομακρυσμένο έλεγχο του χεριού σε πραγματικό χρόνο μέσω αισθητηριακών γαντιών ή συμβατών ρομποτικών βραχιόνων. Με αυτόν τον τρόπο, οι κινήσεις των ανθρώπινων δακτύλων μπορούν να αντιγραφούν απευθείας στο ρομποτικό χέρι, ανοίγοντας νέους δρόμους για την αλληλεπίδραση ανθρώπου-μηχανής.
Η τεχνολογία αυτή μπορεί να αξιοποιηθεί σε πεδία όπως η απομακρυσμένη ιατρική, η εξερεύνηση επικίνδυνων περιβαλλόντων ή η υποβοηθούμενη ρομποτική. Επιπλέον, η δυνατότητα να προγραμματιστεί το Aero Hand ώστε να μαθαίνει και να επαναλαμβάνει κινήσεις δημιουργεί προοπτικές για ρομπότ που μπορούν να εκτελούν σύνθετες εργασίες με ανθρώπινη δεξιοτεχνία.
Παρότι ο σχεδιασμός του Aero Hand Open είναι απλός, η απόδοσή του είναι εντυπωσιακή: διαθέτει 16 ανεξάρτητους αρμούς, ικανούς να προσομοιώσουν το μεγαλύτερο μέρος των κινήσεων ενός ανθρώπινου χεριού. Ωστόσο, η απλότητα αυτή έχει και τις προκλήσεις της. Το σύστημα καλωδίων χρειάζεται περιοδική ρύθμιση ώστε να διατηρείται η ομαλή κίνηση, ενώ τα 3D printed εξαρτήματα ενδέχεται να παρουσιάσουν μικρές αποκλίσεις ανάλογα με τον τύπο του υλικού ή τον εκτυπωτή.
Παρά τους περιορισμούς, η συσκευή αναδεικνύεται ως ένα από τα πιο προσιτά και ευέλικτα παραδείγματα της σύγχρονης ρομποτικής κοινότητας.
[source]



{kind=link}
{kind=link}
{kind=link}